科研动态
迅速从水下模式直接转换到飞行模式, 水空之间敏捷穿梭,这是一种新型的尾坐式三角翼海空跨域航行器—“哪吒-海箭”号。近日,上海交通大学海洋学院博士生金羽飞在国际权威期刊Journal of Field Robotics上发表了题为“Nezha‐SeaDart: A tail‐sitting fixed‐wing vertical takeoff and landing hybrid aerial underwater vehicle”的研究论文。海洋学院曾铮副研究员为通讯作者,上海交通大学海洋学院为第一完成单位。

图1. 新型尾坐式三角翼海空跨域航行器“哪吒-海箭”号
图2. “哪吒-海箭”号敏捷水空跨域
“哪吒-海箭”号是一台具备垂直起降能力和敏捷水空跨域能力的航行器。它可以在不明显减速的情况下完成高速出入水(图2),飞行和潜航保持连贯,无需在水面停顿逗留,也不需要额外的专用动力装置(如压缩气瓶等)辅助。这样的跨域策略可以有效缩短航行器在波浪水面停留的时间,降低风浪流的干扰;且由于有水下积累的动能,即便在跨域过程中因水面扰动失去动力或者有效控制,也能凭借动能越出水面,到达能够恢复动力和控制的高度。相比于在水面漂浮并感知波浪的跨域策略,无缝跨越可以在难以准确感知波浪的复杂海况下提高跨域成功率。
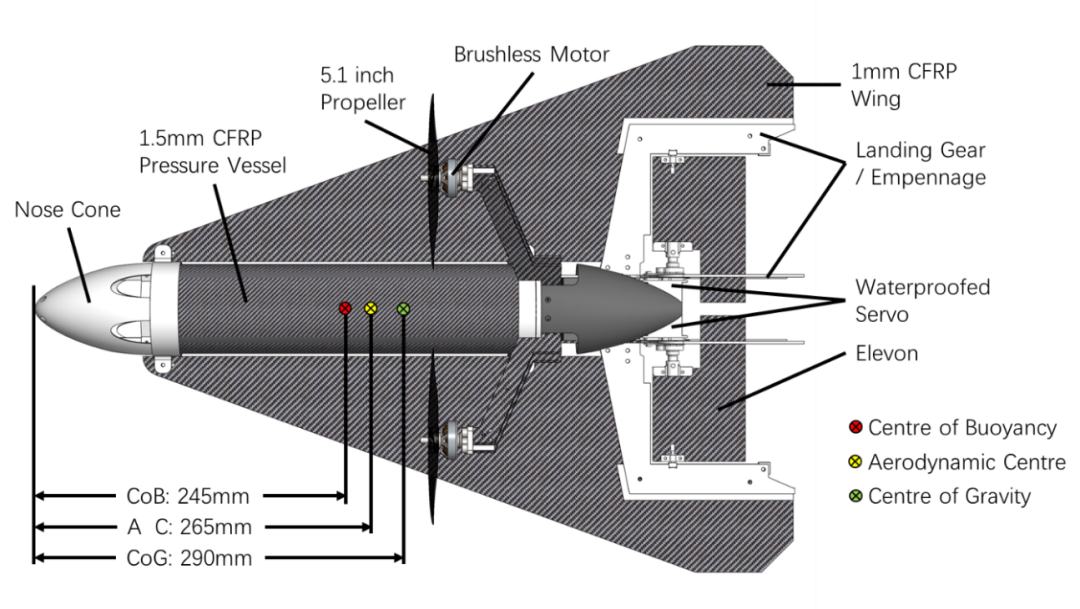
图3. “哪吒-海箭”号俯视图与舱外部件
飞行与潜航整合到同一平台上已非易事,同时还要实现高速飞潜与敏捷跨域更是难上加难。“哪吒-海箭”号创新设计的尾坐式三角翼构型,总长575mm,翼展400mm,自重1.5kg,设计潜深50米,设计飞行高度1000米,更好地融合了多旋翼飞行器操控性好的特点和三角翼飞行器航行效率更高的优势。“哪吒-海箭”号具备垂直起降和悬停能力,可以避免在跨越介质时因介质密度降低而航速无法瞬间提高导致的操控性降低,进而提高跨域时的可操控性,提高跨域成功率。该航行器也可以使用三角翼在空中飞行,提高能量利用效率。它具备良好的流线体外形,在水下航行时阻力更小,更重要地是良好的流线体外形也使得航行器采用水下积蓄动能而后跃出水面的无缝跨域成为了可能。
图4. “哪吒-海箭”三角翼飞行模式
图5. “哪吒-海箭”水下航行模式
与常规海洋航行器和飞行器不同的是,海空跨域航行器因其独特的跨域航行能力,所以涉及的工况更为复杂。传统飞行器与潜航器的设计优化理论不能完全覆盖所需要讨论的设计和工况范围。研究团队推导了适合海空跨域航行器的性能估算与约束分析方程,成功探索适合海空敏捷跨域航行器的概念设计与性能论证流程,并最终实现了较为平衡的两栖航行与跨域机动性能。在实验中,航行器达到的最高飞行速度为125km/h(图4),最高水下航行速度为3m/s(图5)。航行器也多次完成了自主水空跨域机动(图6),证明了其跨域能力的可重复性与稳定性。
图6. 水空跨域可重复性展示
“哪吒-海箭”号成功验证了一种全新的飞潜融合设计构型,展现了稳定、可重复的敏捷水空跨域能力,为进一步提高海空跨域航行器的综合性能带来了新的可能。创新的设计理念使其能够在较大范围内快速响应空中、水面和水下探测的需求,提升了无人观测平台对高时效性任务的响应能力。“哪吒-海箭”号进一步增强了现有海洋观测技术的能力,有望为海洋科学研究、资源勘探、环境监测等领域提供更加灵活和高效的解决方案。
该项研究得到上海市“科技创新行动计划”社会发展科技攻关项目(20dz1206600),上海市自然科学基金(20ZR1424800),上海交通大学深蓝计划重点项目(SL2022ZD106,SL2023ZD206)的资助。
编辑 | 谢安琪